Hello dear blog friends, I’m back after being away due to beautiful, robust, inquisitive, dynamic, gregarious, exuberant, thoughtful reasons. And here we are at the MMT to observe adaptive-optically again!
The installation was more challenging than usual because both MMTO and MAPS teams were somewhat short staffed, but was still all done well by sunset.
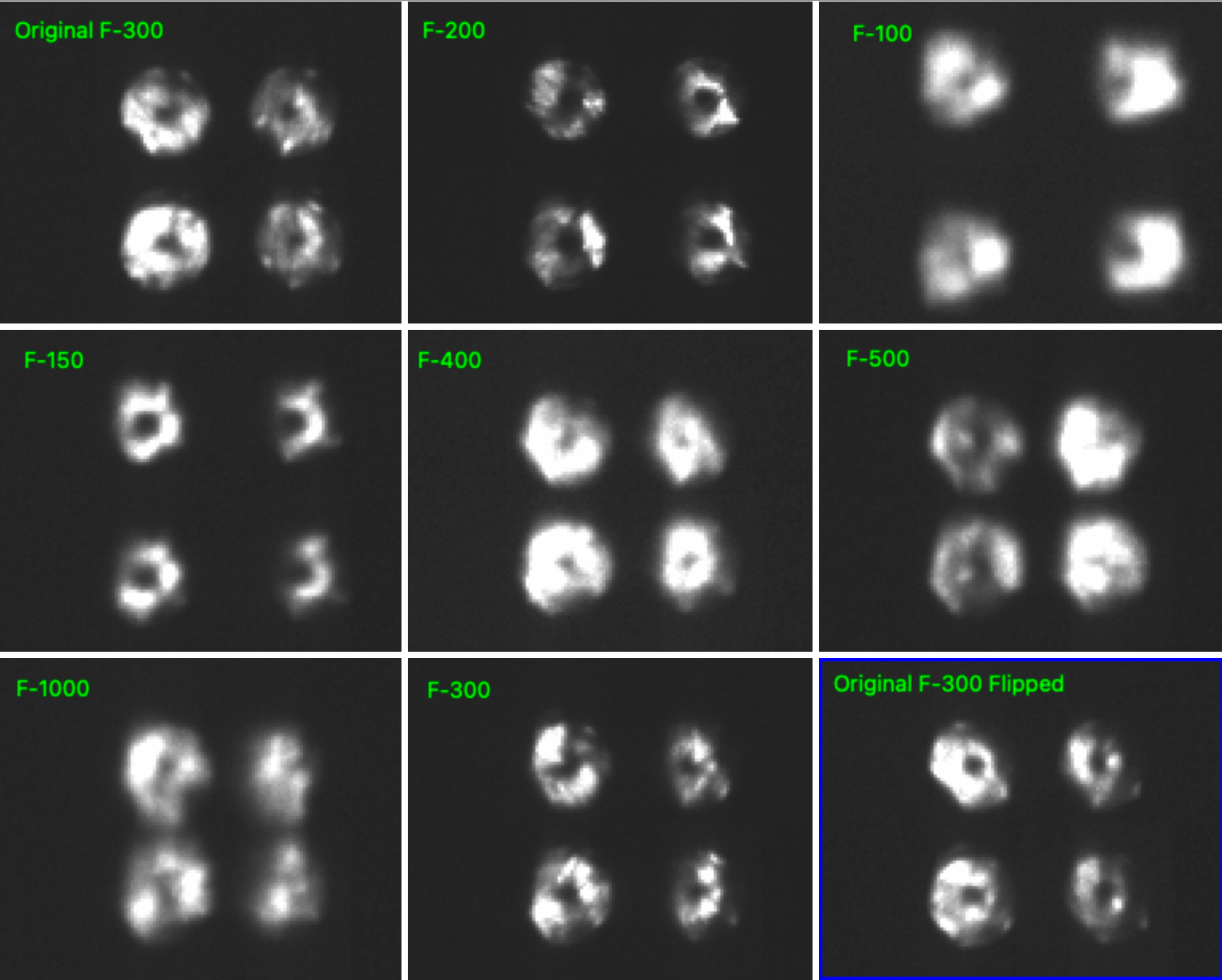
As per usual we started with alignment. Once we got the star on Pisces (with, again, disturbingly unique-to-this-run Az-El offsets), we did a rotational centering test in order to find the chief ray. Not the one where you rotate your images and see where the star goes on the pixels, but the one where you rotate the instrument and see where the star goes on the camera. We started the rotator at -60 and went all the way to +60 — the result was a compact bean (looks kinda like this). We started the rotator at +60 and went all the way to -60 — the result was a large arc (looks kinda like this). (Images taken in strip scan mode.) The center of the bean did not coincide with the center of the arc. The arc did not overlap the bean. We saw the same behavior on the acquisition camera, so it’s not the Pisces mount wobbling. It seems the rotator itself is jumping at the start of a move. And it appeared to be when started from any initial position.
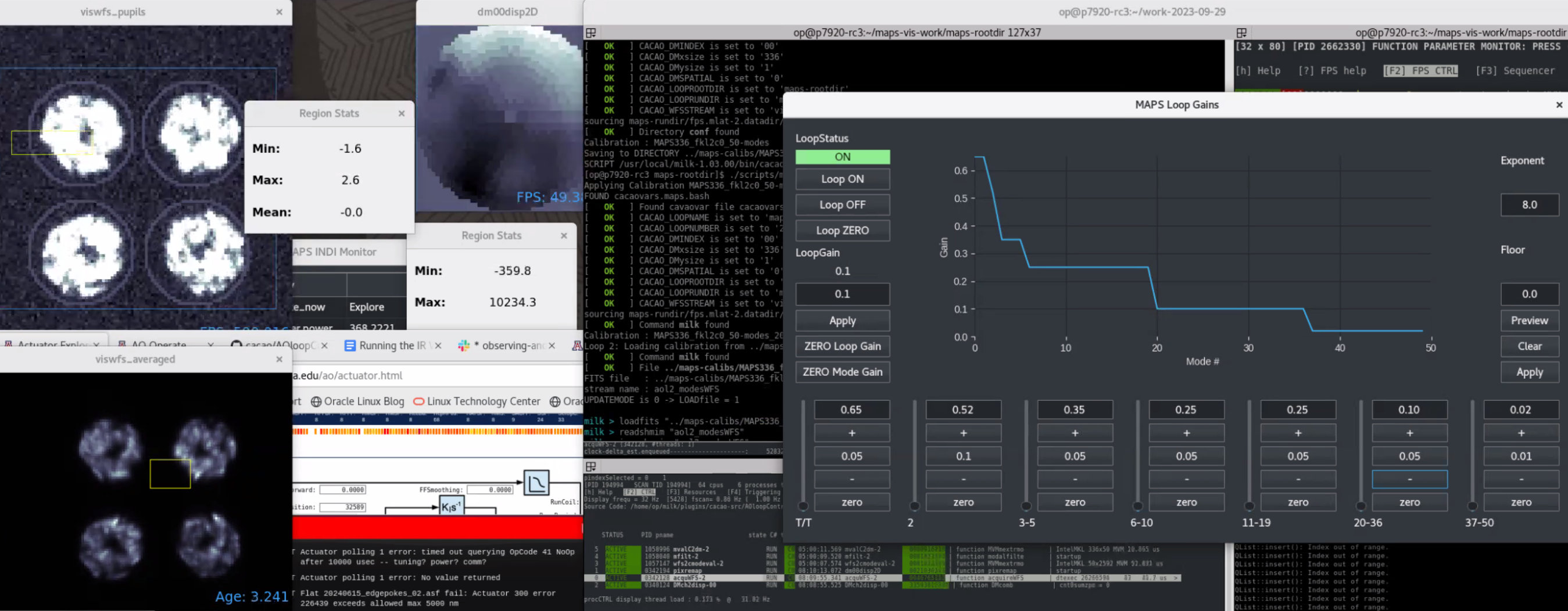
With that diagnosed and the star set to somewhat the average center, we decided to stop messing with the instrument rotator (which we don’t generally move as of yet) and moved on to WFS alignment. This included working on the fibers for the newly re-installed IR WFS, adjusting the tip/tilt mirror settings and checking whether differences between Vis and IR were due to any common optics, and finally closing up at dawn with still an open question about co-alignment. To be continued tomorrow night!
The song of the night is “The Happy Song” by Imogen Heap:

{kind=link}
{kind=link}