We were clouded out tonight:
Also, a truck on the highway had an accident, which closed the highway, so the new turno couldn’t get here so the day crew had to also be the TO’s at night. We’ve been away from home for ~3 weeks and everyone is tired, but we stayed up all night in the control room working.
So, instead, I’ve been working on reducing my data, which includes determining various necessary calibrations for Clio. One important correction needed for high-contrast photometry is calibrating the linearity of the detector. To do this calibration, I took a set of measurements of increasing integration time, and determined the counts per itime:
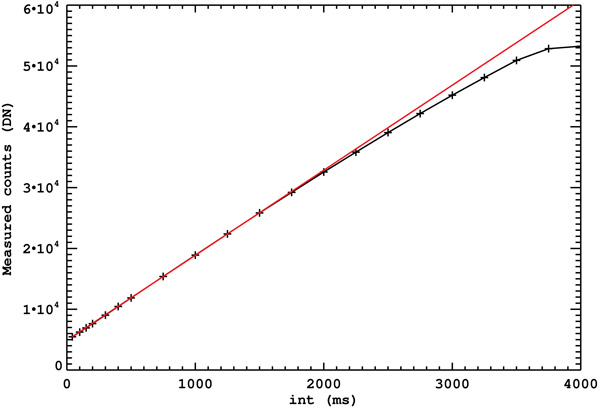
I then fit various functional forms to the data until I found the best calibration of the linearity is a third-order polynomial that must be applied to pixels with counts above ~27,000 DN in the raw images, giving the result here:
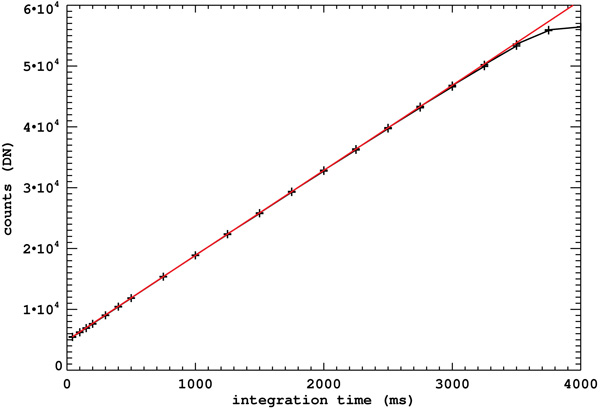
Note that the data cannot be well-corrected above ~45,000–52,000 DN (depending on your tolerance for photometric error), and these values should be considered saturated in the raw images. I apply the calibration through an IDL function I wrote called “linearize_clio2.pro”. This is going onto the Clio observer’s manual.
Jared and I are working on astrometry, comparing Clio and VisAO measurements and exploiting our capabilities for boot-strapping: Clio has a wider field (up to ~30”) and can get a longer lever-arm on astrometric measurements, but VisAO has a finer pixel scale (~8mas) and a tighter PSF and can get precision astrometry on close companions. We are starting by verifying that we both get the same measurements for the locations of stars in the Trapezium cluster. To do this, I look at our Trapezium images and identify which star is which, then I compare the positions I measure to the positions measured by an earlier author. Here’s an illustration:
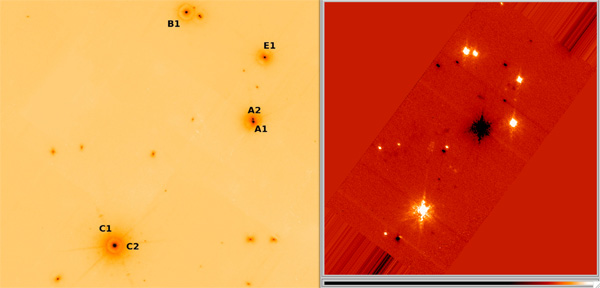
I’ve measured the plate scale in both cameras and various filters, as well as the rotation offset to orient the images with north-up, which I’ve written in the IDL function “derot_clio.pro”. We’re working on a code repository for these data-reduction utilities that we’re calibrating on these commissioning runs.
In fact, Clio has two cameras, a wide and a narrow camera. Here is a comparison of the fields of view, including an illustration of the overlap:
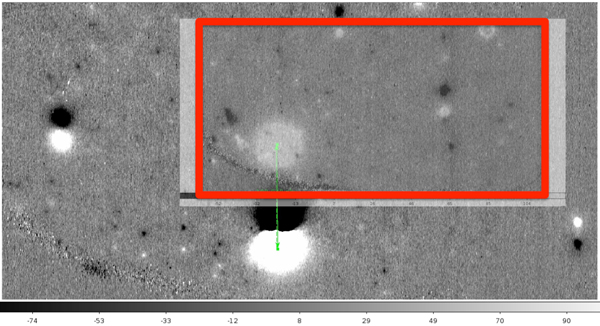
VisAO’s field of view is similar to Clio’s narrow camera along the short direction (8” by 8”).
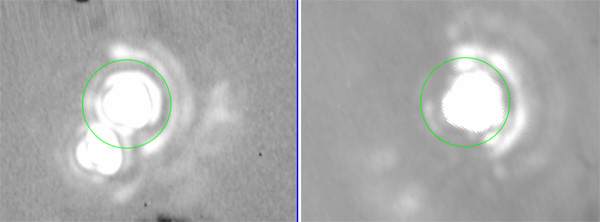
Finally, I’ve been having a bit of fun experimenting with the APP coronagraphs that I want to use for following up GPI planets:
Well, it’s been a long night, good morning!