On our last night (last night) we had a spike of seeing up to 2” that gave our AO system a run for our money:
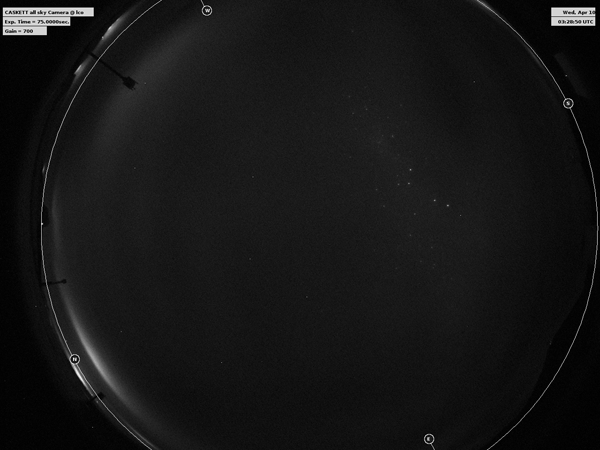
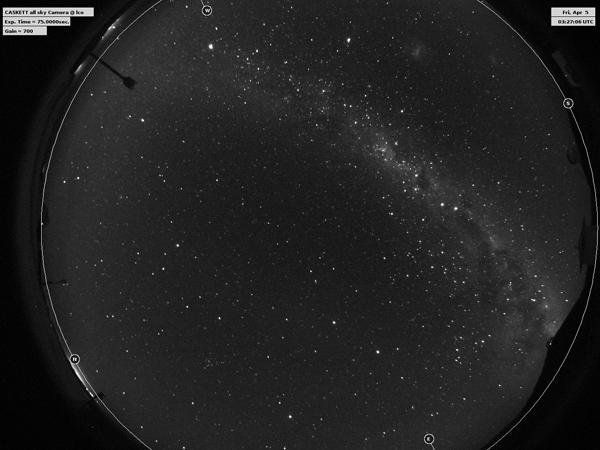
These spikes of seeing made us have to keep re-optimizing our AO parametersYuri Beletsky, Magellan Instrument Support Scientist, sent us this photo with the following note: “Tonight, while you were closing AO loops, I went outside and managed to capture some interesting view – while the night has been definitely not photometric, there is also quite strong airglow! You can easily see it as the green emission (due to atomic oxygen) on the image. On the center-right you can also see the bluish fuzzy ball of the Gegenschein.”Stitching together a picture of the mountain and valley
Well, today we are taking everything off the telescope, it’s been a good run!
Quotes:
“But anyone could go in there and delete it!” – Laird, about doing the AO user’s manual on google docs
“Well, OK, but I could throw your computer off the catwalk.” – Jared
“We should do the manual in IRAF” – Laird
“Ah but then it would be a seeing-limited manual” – Alfio
If you paid close (as the PI) attention to this blog, you probably understood that in AO you have to close (as the PI) the loop (as the PI did). The loop is a close (…) interaction between a sensor, that reads something, and an object that does something in reaction. Here, the “thing” is a deformable mirror. The sensor sees, and ask the mirror to correct; the mirror corrects and the sensor sees something else; then bla bla bla from sunset to sunrise…
What if something goes wrong within this chain? Do you want to know it? Remain in this page. Don’t you want to know it? Look for the Middle Earth safety video on youtube…
A couple of days ago we experienced some very weird mirror stops: suddenly, one (or some, or all) of the internal protections of the fragile secondary mirror registered an error and forced the mirror to rest. Standard procedure. Sometimes, it is better to stop the observations than to clean the dome floor from the 1000 pieces of a broken mirror. Moreover, we are quite superstitious in Italy: “broken mirror, 7 years of pain”. Ask my grandmother (please, not in english), she will confirm….
So far, standard procedure. But which were the reasons for such sudden errors? We investigated deeply the issue….
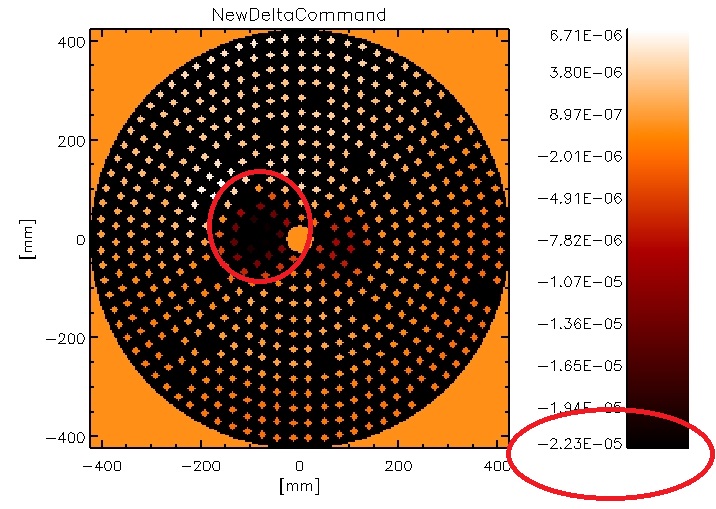
First, let’s look at the last 1000 mirrors command (coming from the sensor). 1: nothing relevant, 2 nothing relevant, 3 nothing relevant, 4 nothing relevant…. 986 nothing relevant, 987 a huge bump on my poor little mirror. Picture below. Who is traitorously pushing 20 micron away the mirror?
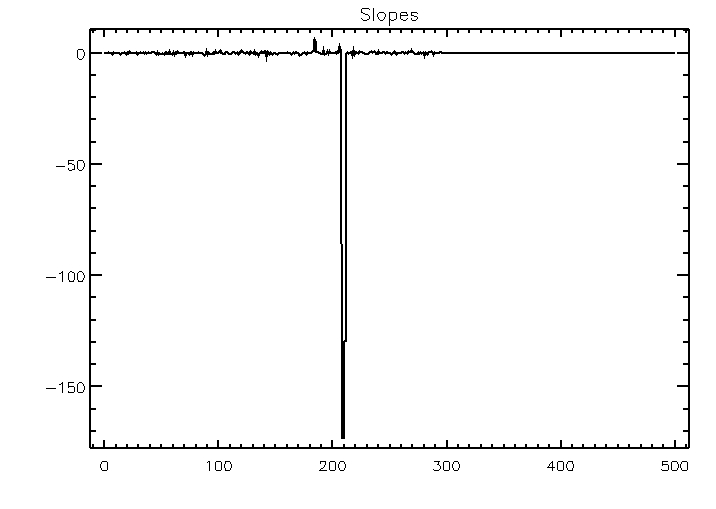
Let’s make the sensor confess! Same procedure: let’s look at the last 1000 signals processed by the sensor. 1: nothing relevant, 2 nothing relevant, 3 nothing relevant, 4 nothing relevant…. 985 nothing relevant, 986 the sensor reads -150 instead of something about zero (picture below). So it will command at the step #987 something sensationally wrong to the mirror
This strange thing seems very likely due to a cosmic ray: an energetic particle coming from the sky. When it impacts on the sensor, this goes bananas. That’s the offender! A traitor cosmic ray.
Please, stop sending cosmic rays on the sensor. This is an old-fashioned, good family mirror, and deserves respect. Cosmic rays, didn’t you learn how to behave, when you were children??
Also, a truck on the highway had an accident, which closed the highway, so the new turno couldn’t get here so the day crew had to also be the TO’s at night. We’ve been away from home for ~3 weeks and everyone is tired, but we stayed up all night in the control room working.
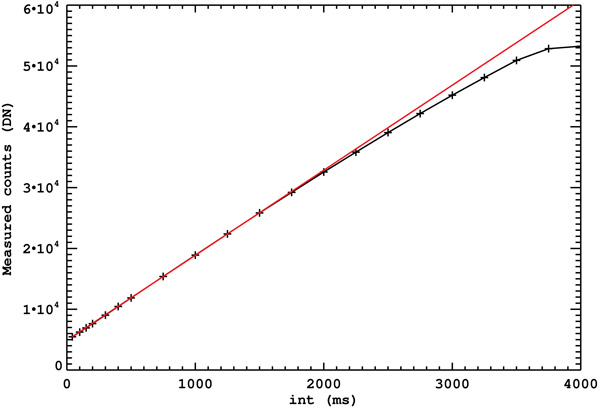
So, instead, I’ve been working on reducing my data, which includes determining various necessary calibrations for Clio. One important correction needed for high-contrast photometry is calibrating the linearity of the detector. To do this calibration, I took a set of measurements of increasing integration time, and determined the counts per itime:
Raw data that are not linear.
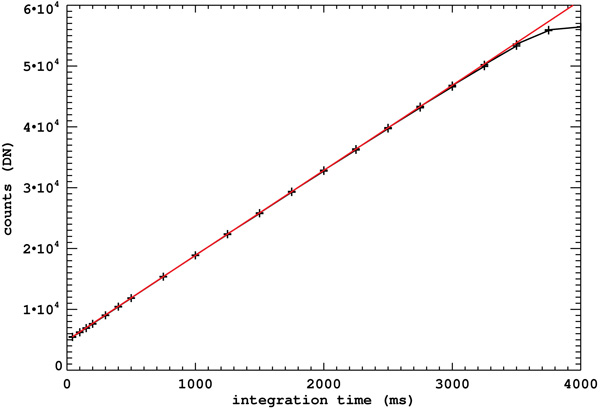
I then fit various functional forms to the data until I found the best calibration of the linearity is a third-order polynomial that must be applied to pixels with counts above ~27,000 DN in the raw images, giving the result here:
The result of applying the linearity correction to the raw data. The linearity calibration must be applied to pixels with values above ~27,000 DN, and is not valid for pixels with values above ~45,000 DN for high-contrast photometry (there is margin up to ~52,000 DN for low-dynamic-range photometry).
Note that the data cannot be well-corrected above ~45,000–52,000 DN (depending on your tolerance for photometric error), and these values should be considered saturated in the raw images. I apply the calibration through an IDL function I wrote called “linearize_clio2.pro”. This is going onto the Clio observer’s manual.
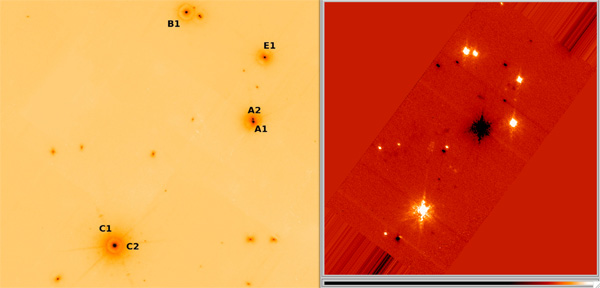
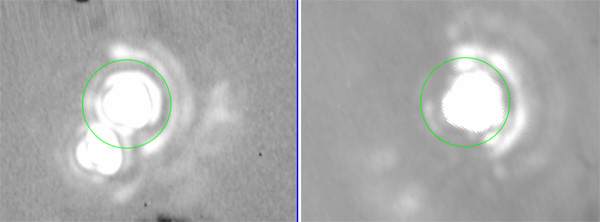
Jared and I are working on astrometry, comparing Clio and VisAO measurements and exploiting our capabilities for boot-strapping: Clio has a wider field (up to ~30”) and can get a longer lever-arm on astrometric measurements, but VisAO has a finer pixel scale (~8mas) and a tighter PSF and can get precision astrometry on close companions. We are starting by verifying that we both get the same measurements for the locations of stars in the Trapezium cluster. To do this, I look at our Trapezium images and identify which star is which, then I compare the positions I measure to the positions measured by an earlier author. Here’s an illustration:
Measuring astrometry using Trapezium stars. (Left) Trapezium as imaged at the LBT/PISCES in the IR a year or so ago. (Right) Trapezium as imaged with MagAO/Clio here at LCO. Can you identify the stars in the picture on the right? (Ignore the black splotches which are negative star images, from the sky subtraction.)
I’ve measured the plate scale in both cameras and various filters, as well as the rotation offset to orient the images with north-up, which I’ve written in the IDL function “derot_clio.pro”. We’re working on a code repository for these data-reduction utilities that we’re calibrating on these commissioning runs.
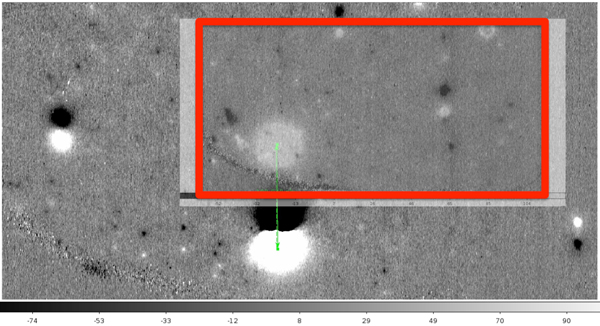
In fact, Clio has two cameras, a wide and a narrow camera. Here is a comparison of the fields of view, including an illustration of the overlap:
The narrow field (16” x 8”) is shown within the wide field (28” x 14”).
VisAO’s field of view is similar to Clio’s narrow camera along the short direction (8” by 8”).
Finally, I’ve been having a bit of fun experimenting with the APP coronagraphs that I want to use for following up GPI planets:
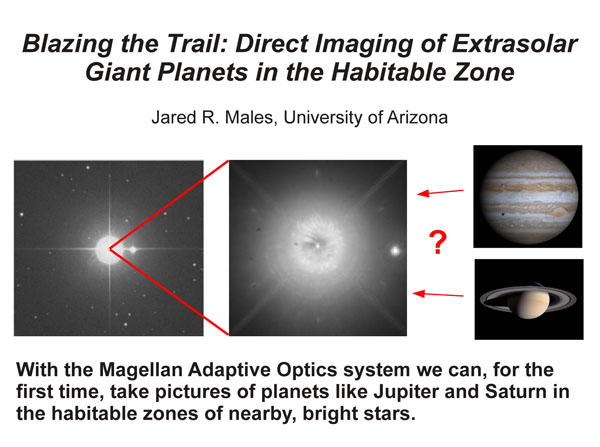
We are pleased to announce that our very own Jared Males (VisAO instrument scientist and software engineer) has been awarded a 3-year NASA Sagan Postdoctoral Fellowship by the NASA Exoplanet Science Institute to bring his PhD work to the next level.
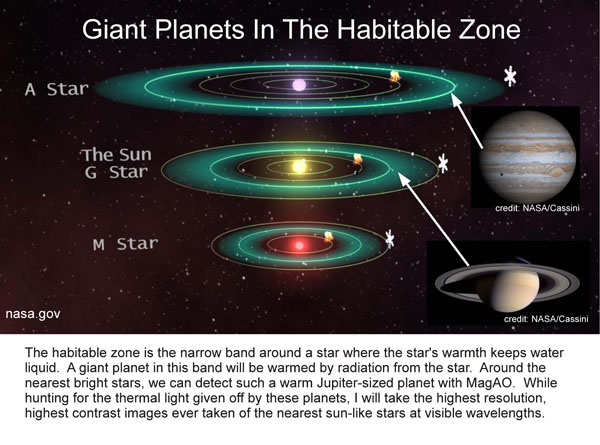
Jared’s Sagan Fellowship is awarded to continue his work on MagAO, and use the system to look for exoplanets in the habitable zones of nearby stars.
MagAO’s and VisAO’s own Jared Males will begin his Sagan Fellowship next year.
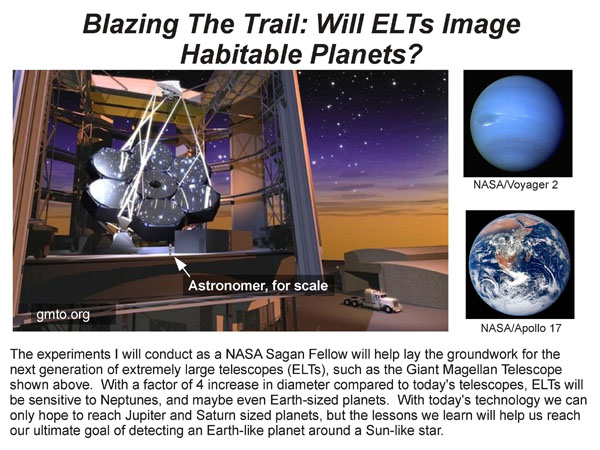
During Jared’s fellowship, he will design and implement sophisticated techniques for imaging exoplanets in the habitable zone of nearby stars, using both MagAO/Clio, MagAO/VisAO, and LBT instrumentation. Read the press release here and here.
Jared will continue at the University of Arizona where he has access to the telescopes and instrumentation he needs for this work. Here is further information about Jared’s project:
It is wonderful for the MagAO project to continue getting this recognition for the great strides our instrument is making in exoplanet research. Congratulations, Jared, and welcome to the Sagan Fellows family!
Alycia says I’m spoiled. Fine. But when you’re used to half arcsecond seeing, one arcsecond seeing is a “disaster” (Alfio’s word, not mine).
Seeing blew up right before it was time to do my favorite star.
We did do some good science tonight. The AO system is running fantastically well now that we replaced the troublesome switch BCU, and our two cameras are catching all sorts of diffraction limited circumstellar photons.
On my way up tonight I had to negotiate a Burro herd.
Just standing around, slowing traffic.The babies were making all sorts of noise. They sound just like you’d expect: hee-haw.Mom. She made sure I didn’t get too close.
Vizzy was in his usual spot:
Sleepy.
We had a surprise visitor in the control room tonight:
This little dude was hiding under Katie’s bag. Fun.
Tonights quote:
“When it’s good, it’s very good. The problem is when.” — Alfio, talking about a nameless telescope, somewhere else.